automated guided vehical
I can program a vex robot to do certain tasks like transfer anything to a certain place that is needed. i do this by using a programing system called "ROBOTIC for VEX Cortex."
challeng details
We had to build an AGV for an assembly plant. the AGV is going to be used to deliver parts back and forth down the assembly line. There were a number of design constraints that we had to follow.
Some of the design constraints were:
here is the document of the challenge:
Some of the design constraints were:
- drive a strait line back and forth.
- must move back and forth based on closed loop control
- will not start until a button on the robot is pressed
- same button is held at the end of a cycle
- robot will stop after completing a trip back and forth
here is the document of the challenge:
Brainstorming



|
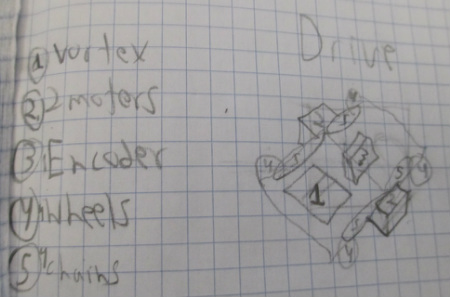
This is the brainstorming page in my engineers notebook. There are three different parts to it.
1.) 3 main ideasMy team had three ideas on what we could use to make the AGV go a to where it is needed.
1.) Ultra sonic censor: we made a decision that it was unreliable because the sound waves could bounce off of tiny things and not go where it is supposed to go. it could stop before needed. 2.) Light censor- we decided that this was not a good decission also because then the AGV would have to be right up against a wall in order to become dark enough to stop. 3.) Encoder- we decided to go with this censor idea because we could make the vehicle go any distance we want it to. we put the encoder on one of the front axil's, to determin how to get the distance it has gone. 2.) Drive setup and parts listWe made a sketch of what the vehicle would look like and where certain parts would be. the parts are listed by numbers and labeled on where the part would go on the robot.
Here is the list of parts:
3.) Psuedo codethis is the psuedo code we came up with. it had all the things we needed to do. then we had silas transfer it to actuall code on the computer. there were some points where we helped him. Although i will give him most of the credit for the computer code.
|
final code

this is the final code of the programing. this is made on the "ROBOTIC for VEX Cortex" program. this program seems complicated, but it realy isn't. the only problem we had was the emergency switch but we figured that one out. We had to make a whole separate task for the emergency stop.
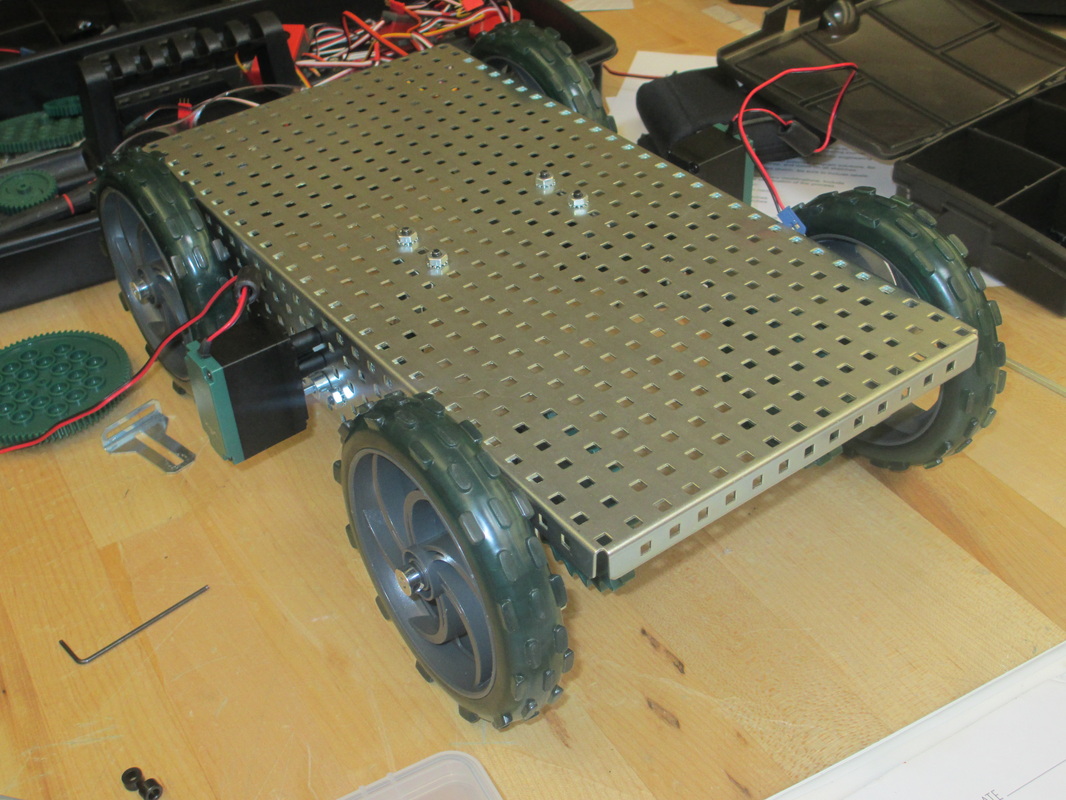
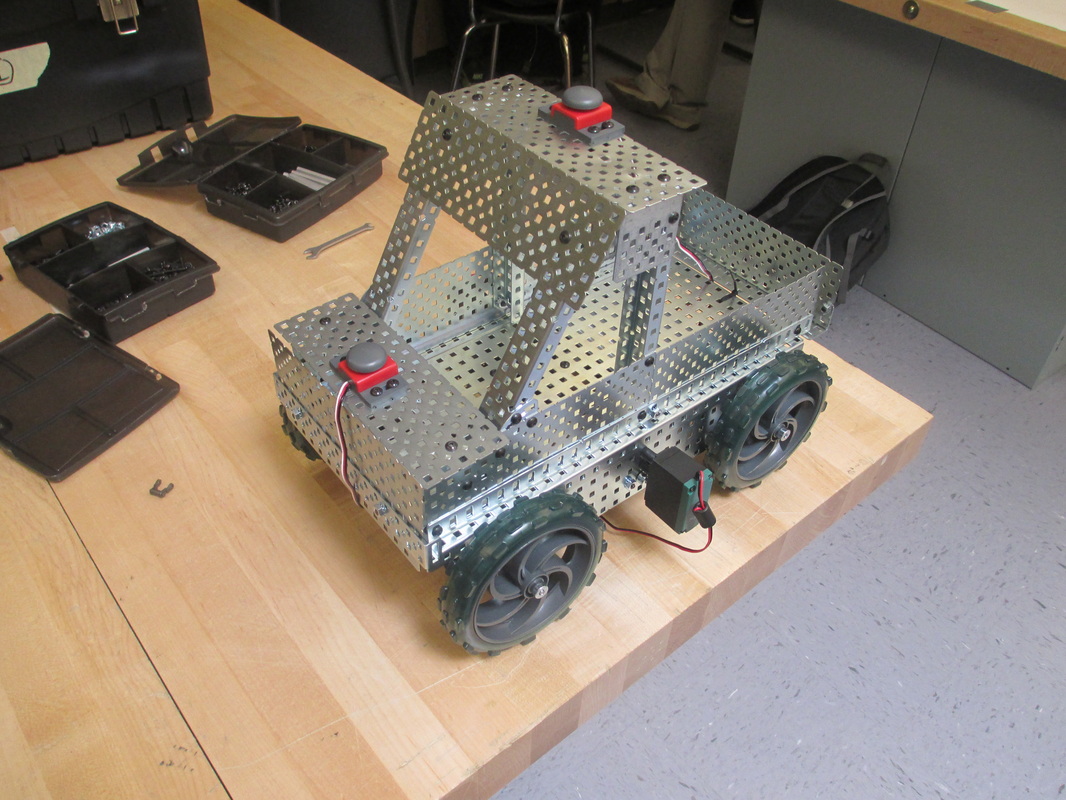
step by step pictures
This gallery of pictures shows what we did to build this magnificient machine for the most part. so while silas was doing code, packard and I were building the robot. when silas was stuck he would come and help us and think about how to get past the code problem. Building was the most fun part of it.












Before and after i put my little touch on it
|
|
